Setup Remote Control Link:
Ruby supports controlling your drone/plane/vehicle using the Ruby radio link.
To enable and use remote control functionality, you need to connect a joystick, gamepad, DIY joystick or a regular RC transmitter to your Ruby controller using a regular USB cable or using the IBUS/SBUS protocol.
See the Hardware Peripherals on how to make the connections for your input device.
Calibration:
If you are using IBUS/SBUS input protocol from a RC transmitter, then just skip this calibration step. It's not needed and not present in the menus, as all the calibration and channels settings are done on your RC transmitter itself.
On the Ruby controller, calibrate your joystick/gamepad:
Go to
Menu->Controller->Peripherals and there you will your joystick and options to calibrate the joystick and set the center dead zone (for the gimbals/joystick):
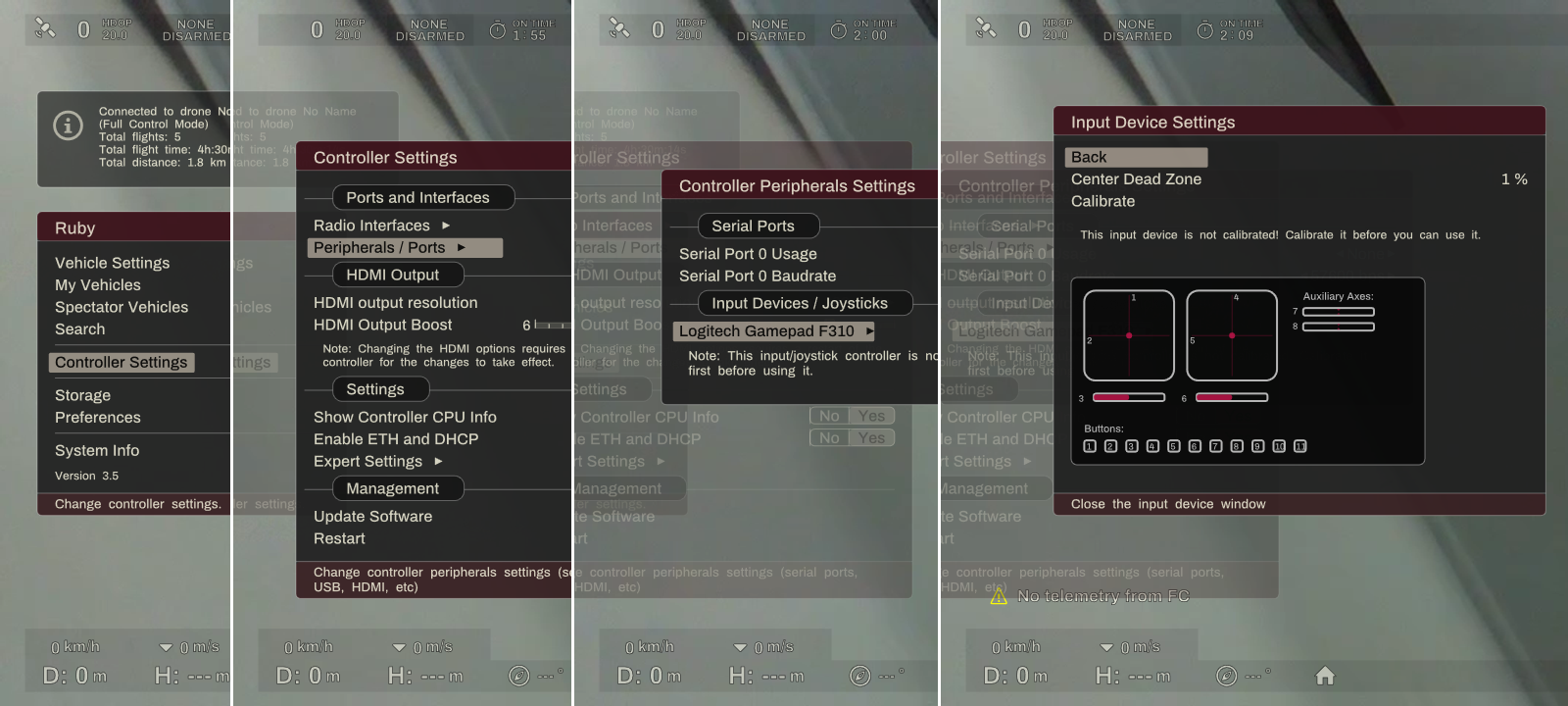
Joystick calibration (needed only for USB joysticks, not for IBUS/SBUS input)
Note: You do need to do the calibration for your joystick before you can properly enable and use the RC link.
After you connected your joystick and did the calibration, or, if using IBUS/SBUS protocol, after you connected your transmitter to Ruby using the schematics from Hardware Peripherals, you can now configure and enable the RC link:
RC Link Settings:
You need to configure your RC link and channels to control the vehicle as needed:
Go to
Menu->Vehicle->Remote Controll and there you'll have options to:
* Enable the RC Link;
* Choose what input device you have: a USB joystick or a IBUS/SBUS device;
&nbps;&nbps; If you use a IBUS/SBUS device with the additional Raspberry Pi Pico attached to the Ruby controller, you can set the protocol (SBUS or IBUS) and if it should be inverted or not from
Menu->Controller->Peripherals->I2C Devices->RC In
* Set the RC frames frequency;
* Set the failsafe type and values;
If using a USB joystick, you need to assign joystick inputs to each RC channel. Basically you tell Ruby what RC channel is controlled by what stick or button on the joystick:
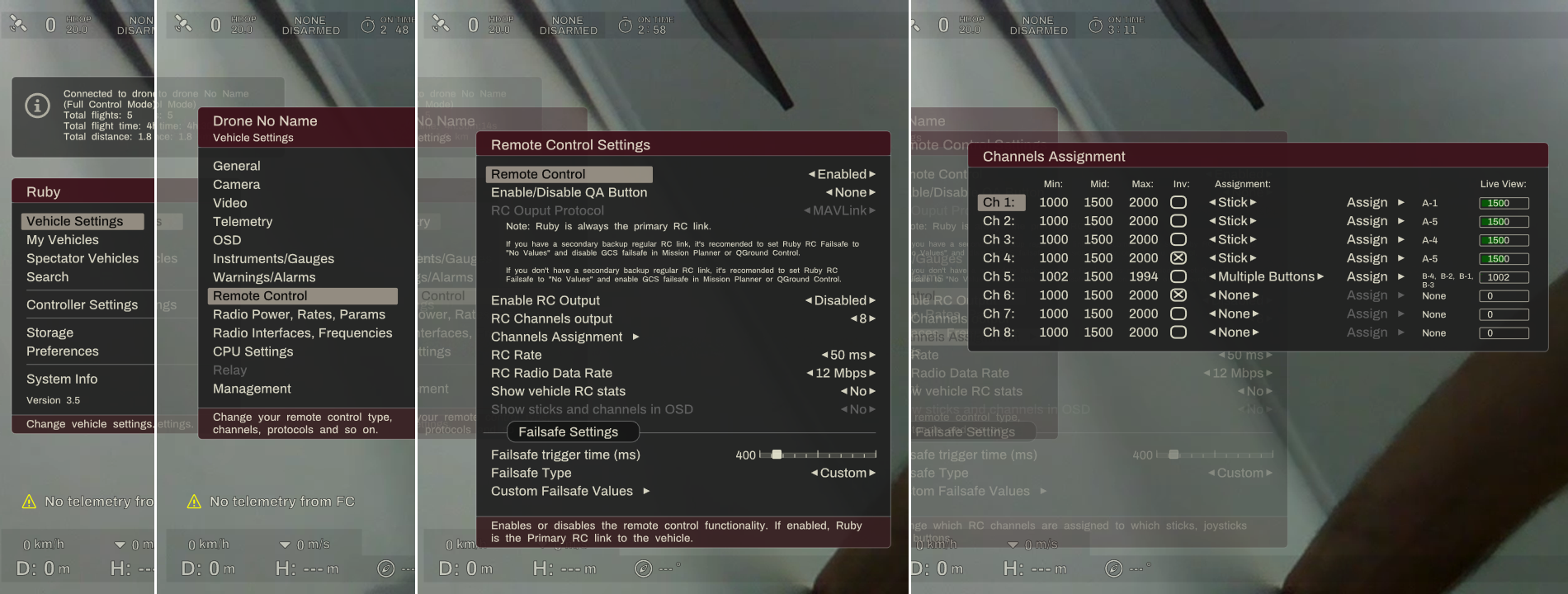
Configuring RC Channels (needed only for USB joysticks, not for IBUS/SBUS input)